Outdoor Flying Augmented Reality Anwendungen in städtebaulichen Planungssituationen

| Ansprechpartner: | |||
|---|---|---|---|
| Förderung: | Startup Förderung des KIT | ||
| Partner: | cand. el. Marius Müller | ||
Outdoor Flying Augmented Reality Anwendungen in städtebaulichen Planungssituationen
Ausgangssituation
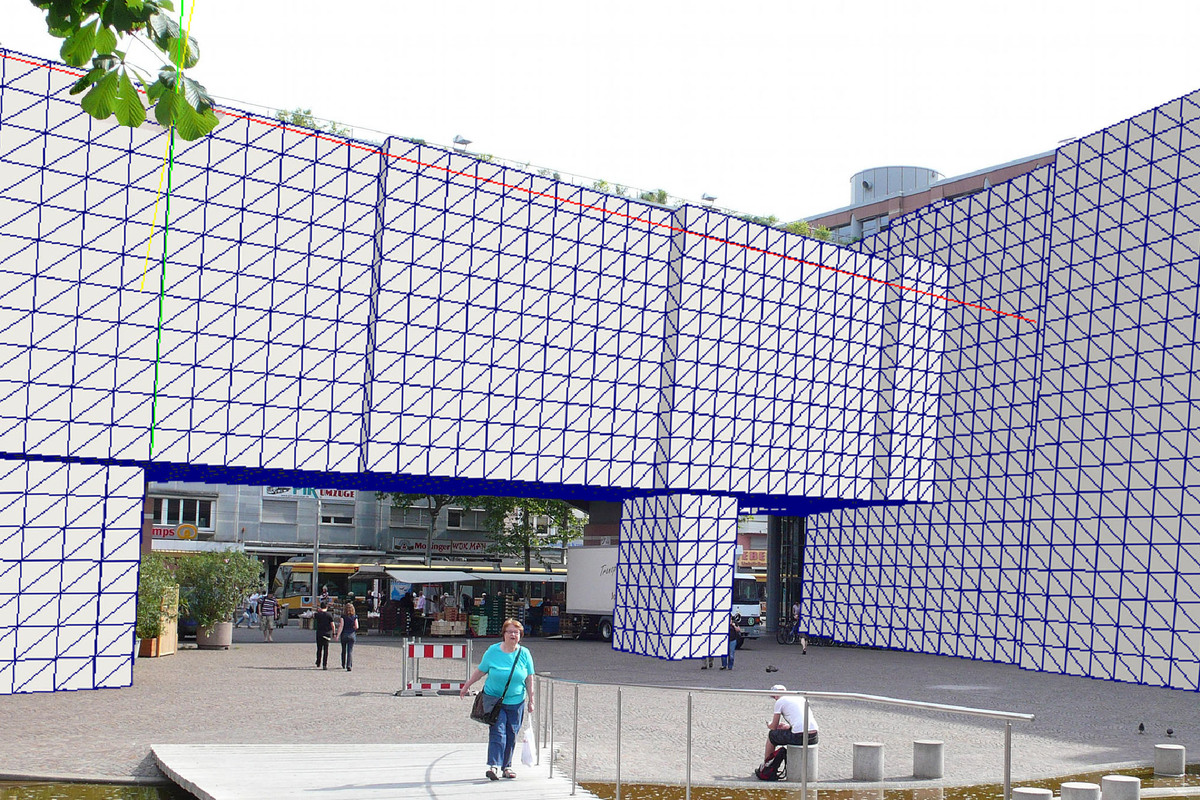
In Augmented Reality (AR) Anwendungen werden virtuelle Objekte in reale Szenerien eingebunden, mit ihnen kombiniert und visuell dargestellt. Bei Anwendungen der AR im Aussenbereich werden dazu Ort, Ausrichtung und Neigung der Aufnahmeeinheit durch GPS und die Auswertung von Lage-, Neigungs- und Beschleunigungssensoren bestimmt. Durch die ubiquitäre Verfügbarkeit von Datendiensten und die weite Verbreitung von leistungsfähigen mobilen Endgeräten (z.B. Smartphones) haben sich in jüngster Zeit vielversprechende Anwendungsbereiche der AR entwickelt. Diese Anwendungen konzentrieren sich auf die Bereitstellung von ortsgebundenen Serviceleistungen (Location Based Services) kommerzieller Dienstleister und auf die Erweiterung der Leistungsfähigkeit sozialer Netzwerke. Die Potentiale der AR werden dagegen noch nicht in der Planung und Bewirtschaftung von Gebäudebeständen eingesetzt, obwohl genau hier der Zugriff auf gebäuderelevante Informationen und deren Kombination mit der gebauten Umwelt zu deutlichen Verbesserungen der Informationsqualität für verschiedene Nutzergruppen beitragen kann. Eine weitere Einschränkung besteht derzeit darin, dass die kombinierte Visualisierung von semantischen und realen Informationen auf die konventionellen Bewegungsräume von Menschen reduziert bleibt und in Stadträumen keine freie Bewegung in allen drei Dimensionen möglich ist.
Projektbeschreibung
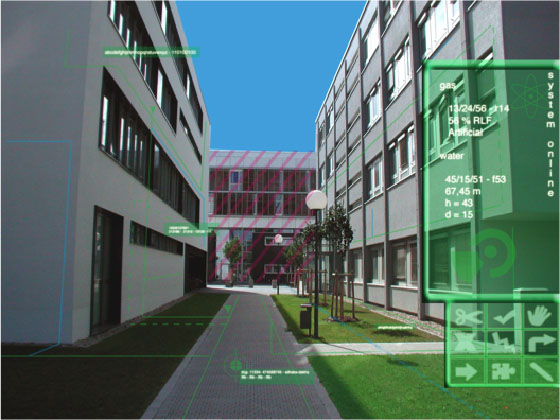
Das Startup Projekt realisiert ein Anwendungsszenario, welches die Potentiale der AR in der Gebäudeplanung- und bewirtschaftung effektiv umsetzt. Dazu werden im Stadtraum eindeutig identifizierbare Markierungen gesetzt und durch Quadkopter in einer Höhe von bis zu 50 Meter beflogen. In diesem Aktionsrahmen können für den Großteil innerstädtischer Quartiere nahezu beliebige Betrachtungspositionen eingenommen werden und der in Echtzeit übertragene Videostream durch die Überlagerung der realen Welt mit planungsrelevanten Informationen ergänzt werden.
Eine große Herausforderung ist hierbei aber die genaue Echtzeit-Verortung der Bilder auf Basis der ungenauen Sensor- und Bilddaten und die darauf angepasste Darstellung der Planungen oder Simulationen in das Kamerabild. In diesem Anschubprojekt werden durch die interdisziplinäre Zusammenarbeit von Bauinformatik, Elektronik und angewandter Mathematik die unmittelbaren Anforderungen der Gebäudeplanung und Visualisierung durch die innovative Verwendung handelsüblicher programmierbarer Flugeinheiten, mobilen Markierungseinheiten, mit mathematisch aufbereiteten Sensordaten und angepasste Visualisierungstechniken realisiert.
Vorgehensweise
Das Projekt setzt sich aus drei Arbeitspaketen zusammen:
Programmierbare Quad- oder Octocopter liefern im Flug neben Livebildern auch Ortsinformation durch Orientierungssensoren und Bildanalyse. Durch die Verwendung von schnell reagierenden Sensoren ist die absolute Ortsauflösung in direkter Verwendung ungeeignet. Die den Geräten mitgelieferten Bildanalyse-Funktionen erlauben durch die Verwendung positionierter Marker rudimentäre Visualisierungsmöglichkeiten, sind aber für die absolute Positionierung des Fluggeräts ebenso ungeeignet. Durch die Kombination der Bildanalyse, vom Boden und Livestream, sowie der zeitabhängigen Auswertung der Sensoren können durch mathematische Modellierung und Optimierung eine genaue Verortung realisiert werden.
Herkömmliche Software zur Darstellung von Gebäudemodellen und Simulationsergebnissen sind nicht für die Echtzeit-Einbettung der Daten in ein Kamerabild vorgesehen. Die Daten werden in portable Dateiformate exportiert und durch eine zu entwickelnde prototypische Steuerungs- und Visualisierungs-Software unter Verwendung der Bilddaten und optimierten Verortung dargestellt, sowie die Drone angesteuert.
Das Projekt soll im Rahmen der Anschubphase aufgrund der ausdrücklich experimentellen und visionären Ausrichtung und Aktualität in Presse und Medien maßgeblich von Studierenden und Doktoranden unter der Mithilfe der Antragsteller durchgeführt werden. Das Projekt steht unter Einbeziehung von Campus Nord und Süd im Zentrum der Kompetenzfelder „Bauwerke und urbane Infrastruktur“, „Algorithmen, Software und Informatiksysteme“ und „Mathematische Modelle“ aus den Kompetenzbereichen „Erde und Umwelt“ und „Information, Kommunikation und Organisation“ und fördert unmittelbar deren Vernetzung.
Marker

In kleinen Maßstäben sind auf Papier gedruckte Marker eine übliche und erprobte Lösung für die Bestimmung von Ausrichtung, Neigung und Position der aufnehmenden Kamera. Bei größeren Abständen und der Verwendung außerhalb geschlossener Räume ist diese Methode jedoch unhandlich, teuer und nicht mehr praktikabel. Derzeit ist diese Problematik nicht gelöst und verhindert damit den Einsatz der beschriebenen AR Anwendungen in großen Aktionsradien. Das Start-Up Projekt widmet sich dieser Fragestellung und untersucht kompakte, selbstleuchtende und mobile Marker, die in dem zu beobachtenden Gebiet positioniert werden, durch das AR-System erkannt werden und für die geometrisch korrekte Kombination von virtuellen und realen Objekten verwertet werden.
Vorarbeiten haben hierbei ergeben, dass den Detektionsverfahren angepasste Marker um mehrere Größenordnungen verbesserte Signal-Rausch-Abstände erreichen können, und damit selbst unter widrigen Umweltbedingungen, großen Abständen oder schwächeren Kameras, eine genaue Positionierung erreichen können.
Reflektierende Marker sind zwar bekannt, haben jedoch den Nachteil, dass sie bei sich ändernden Umgebungsbedingungen und Lichtverhältnissen schwer lokalisierbar und damit nicht ausreichend sicher erkennbar sind. Die selbstleuchtenden Marker haben hier wesentliche Vorteile. Ziel des beantragten Projekts ist daher die Entwicklung von selbstleuchtenden Markern, die für die Erkennung aus großer Entfernung auf einer großen Fläche von einem fliegenden Kameraträger aus geeignet sind.

Für eine ausreichende Sichtbarkeit aus allen Richtungen muss ein auf dem Boden stehender Marker in den gesamten oberen Halbraum strahlen. Die leuchtende Oberfläche darf nicht zu klein sein, damit das Kamerabild nicht überstrahlt, die Lichtstärke muss jedoch ausreichend sein, damit sich der Marker von der Umgebung abhebt. Für eine bessere Detektion im Kamerabild sollen die Marker unterscheidbar und synchronisiert blinken. Da für eine Bestimmung der Raumkoordinaten mindestens drei Marker, besser jedoch mehr Marker notwendig sind, sollen sie durch codierte Blinksequenzen unterscheidbar werden. Ein zentrales Ziel ist damit auch die Bestimmung optimierter synchronisierter Sequenzen zur Detektion.
Daneben muss die Leuchtstärke an das Umgebungslicht angepasst werden, so dass sowohl an einem bewölkten Wintertag als auch an einem hellen Sommertag zur Mittagszeit eine Erkennung der Marker möglich ist. Gerade für letzteres ist eine sehr intensive Lichtquelle erforderlich, die mit einer Anzahl Hochleistungs-LEDs realisiert werden soll. Diese müssen ausreichend gekühlt und zusammen mit der Ansteuerungselektronik und Energieversorgung für den Außeneinsatz geeignet verkapselt werden. werden. Mit Hilfe eines Umgebungslichtsensors wird die Lichtstärke an die Umgebungsbedingungen angepasst, so dass neben einer optimalen Erkennbarkeit die Einsatzdauer bei gegebener Akkukapazität maximiert wird.
